Geovisualization Project Assignment, SA8905, Fall 2018 @RyersonGEO
By: Cody Connor

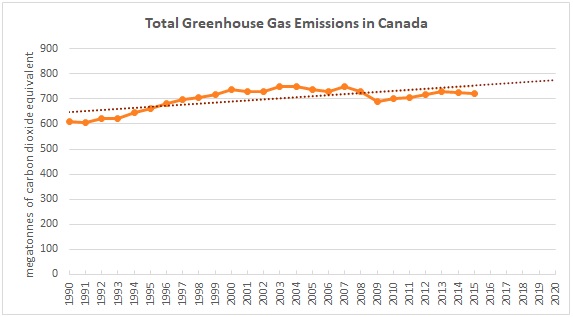
The city of Toronto is large and still growing, the influx of new people brings more vehicles and as a result more vehicular traffic. The increase noise across the city is highly correlated with vehicular traffic in the city will inevitably be higher as more vehicles drive on our roads. To monitor this change in noise, vehicular traffic counts are collected by Toronto public health along with the University of Toronto and Ryerson University. The traffic counts can be assigned to specific road networks which can be used to create a model of the noise in city.
SoundPlan is a noise modelling software used to take the traffic data and estimate noise levels across the city. The program can create different types of maps for example a grid level map or a Façade map. The Facade map was used for this project to help distinguish noise levels on the faces of buildings.
The first step in creating a Façade noise model is to insert a Shapefile that include all building assets of the selected study area. This includes information about the shape and size of the buildings (specifically the king street area in this case) and even includes data as specific as the number of floors in each building and the number of residents who live there. This allows the program to assess the noise levels that will affect the residents of each building over time. In SoundPlan the user can visualize the building assets in a three-dimensional environment which helps to distinguish errors in building size and height.

The user has to connect the imported Shapefile attributes to the assignment table within Soundplan. This is critical as if some buildings properties are not imported properly, the model will have errors and likely wont run. The image above shows the connected Shapefile to the Soundplan properties.
After importing the building attributes, we can now move on the the road network Shapefile. This file has the physical characteristics of the road network in Toronto as well as the traffic information that is used to calculate the noise in the city. The physical characteristics of the roads can be as simple as the shape and size of the road and can become more specific like the type of pavement and the incline or decline of the road. This becomes important in the noise model as noise will vary based on these variables. An engine in a vehicle will need to work harder if there is a significant incline in the road and if the road has a different pavement type like brick, it can increase the noise as well.

The traffic noise also includes what types of vehicles are traveling on the road at the time of measurement like cars, larger trucks, large transport vehicles, buses and even bicycles. Larger vehicles will cause more noise and therefore it is important to make the distinction. Finally the speeds of the vehicles are taken into account as this is the primary reason for the noise levels. It is well known that engine noise in vehicles increases as the speed increases. Interestingly as vehicles approach 60 km/h, the noise associated with the tires on the pavement become louder than the engine noise. This means that when working with highways this type of information is vital. Because this project only involved city streets and the speeds for the most part are under 60 km/h, it was not necessary to import these properties in detail.
Once both of these variables are imported to the program there are still a few steps before a noise model can be run. Firstly a digital ground model must be calculated and associated with both variables. A digital ground model is essentially the plain in which the variables can be attached so as to ground them to a common point. The Soundplan software allows the user to either import a DGM or calculate one based on the files imported.
Once the buildings and roads are set to the ground model there is only one step remaining in order to run a noise model.
The last step before running a model in Soundplan is to create a calculation area. This area defines the boundaries where the calculation will take place. The image below shows the buildings, roads and the area defined for the calculation.

The roads can be seen highlighted in red while the buildings are shaded as green with a blue outline. The calculation area that defines where the program will focus the model is the green box located in the middle of the King Street Area. This area is smaller than the total size of the study area because of the time it takes to calculate a Facade map. For just the area contained within the green box, the model ran for over 16 hours. To run the entire study area, it could take a week to make that calculation.
After importing all the necessary files to run the model which can be as simple as the one I ran, but can include much more specific data, the program needs to know what type of calculation should be run. This is where the user will indicate the Facade or Grid level map.
The way the calculation is run for the Facade map can be complicated. First each building is assigned noise calculation points which are spread across the Facades at a distance that the user sets. In this case the points were every 2 meters. The number of points has a direct influence in the scale of the calculation being run. Because this is a three dimensional environment, the points are not only across the Facade but are located at those points at every floor.

The final map as shown above shows the distribution of noise as modeled on the Facades of the buildings in the study area. The building faces closest to the road are seen to be the noisiest and as the faces get further away the noise decreases. Overall the downtown area is very noisy and this map demonstrates this.
































{kind=link}
{kind=link}
{kind=link}
.gif){kind=link}